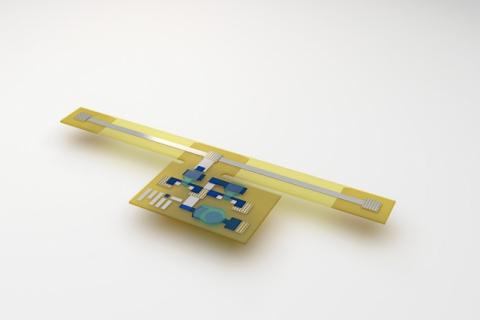
Thursday, March 23, 2017New 3-D-printed device mimics the goldbug beetle, which changes color when prodded. http://news.mit.edu/2017/goldbug-beetle-printable-sensor-laden-skin-robots-0323 tags: Robotics Machine Condition Mechanical Electrical Printed Portable Large-Area Related People: Marc Baldo Wojciech Matusik